人们用过各种方法来确定容器中的液位高度,但最近,电容式感测法因测量的高准确度和分辨率变得流行起来。如果您曾用电容式液位感测法进行过设计,那么当您把自己的手向您的系统移近时,您可能看到错误的测量读数。这是由于传统电容技术在稳健性方面存在局限而造成的,特别是有人手等任何外部寄生电容干扰时上述情况更容易发生。例如,不妨想想用液位感测法来确定每杯咖啡所需水量的咖啡机。要烹制一杯完美的咖啡,您需要适量的水。如果一个人在咖啡机运行时与其进行交互,那么人体的寄生电容干扰就会中断咖啡的混合。
在本文中,笔者将谈论传统的液位感测方法以及由TI提出的一种新方法 —— 被称为异相(OoP)技术,使用FDC1004电容数字转换器。这种新方法可提供必要的屏障,以尽量减少干扰,同时最大限度地提高系统信噪比和整体稳健性。
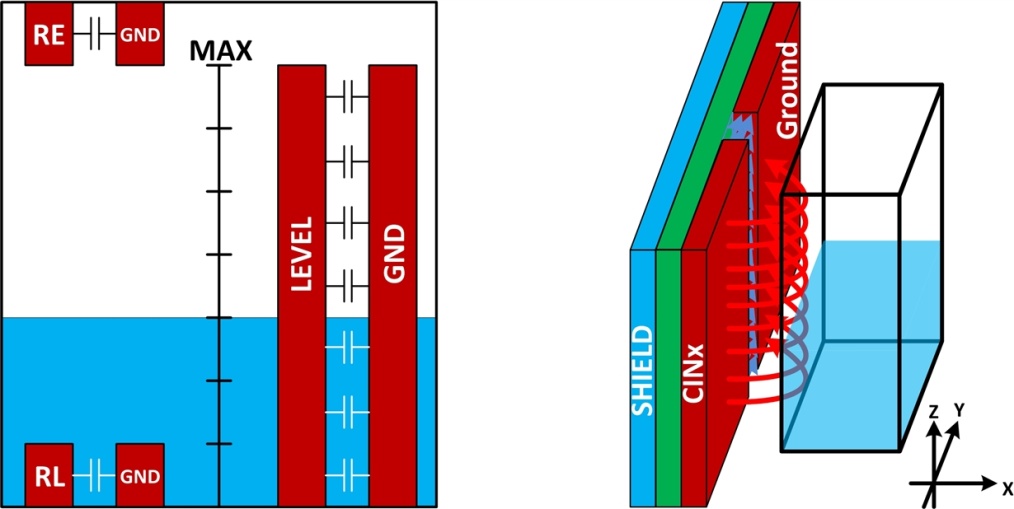
传统方法采用平行手指拓扑结构:一个电极由激励信号驱动,另一个电极连接至接地(GND),如图2中左边所示。以GND为参考的电极存在的问题是,水具有电压电势差。当手接近装有液体的容器时,一种附加的寄生电容被引入到模型,自体电容会直接与水的电势差耦合在一起。这可以导致误测偏差和系统不准确。
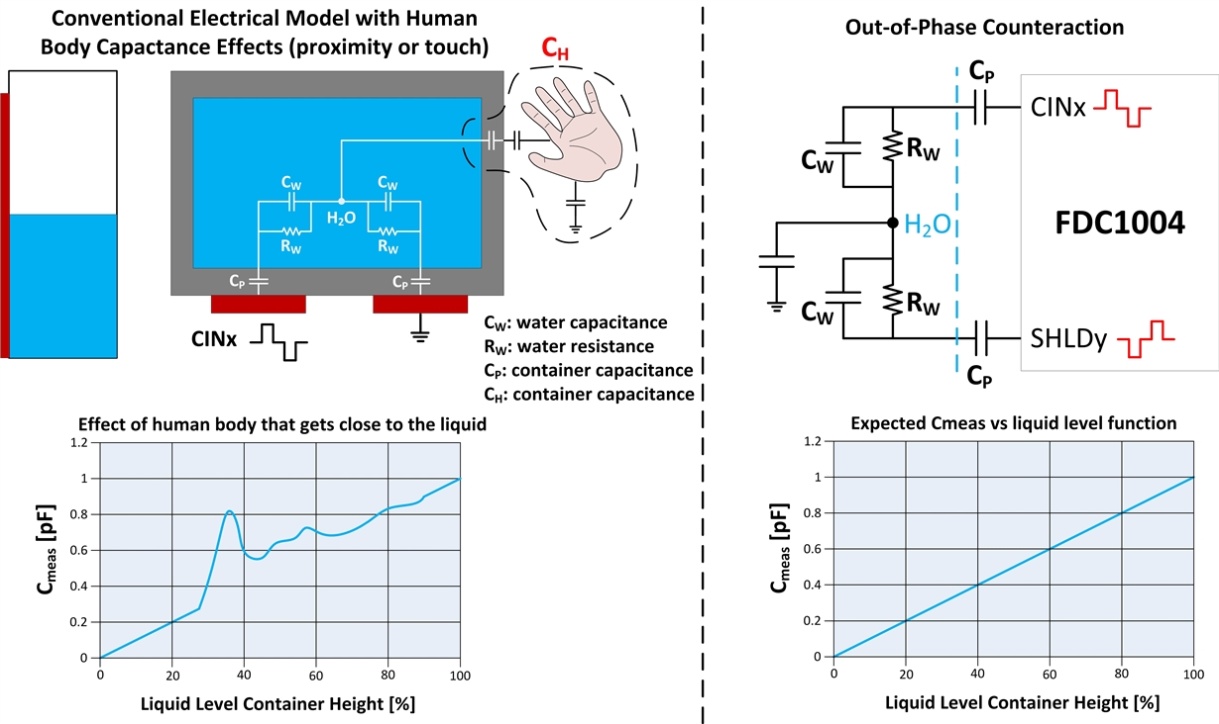
OoP技术依赖对称的传感器布局,还以独特的方式利用FDC1004电容数字转换器上的屏蔽驱动器来抵消人体电容的影响,并使测量值稳定。有了OoP技术,通过采用差分电容测量法,液体电势可在激励/驱动阶段保持恒定,从而能从测量值中消除人体电容的影响。OoP技术不使用GND电极,而是让CINx电极与SHLDy电极配对。CINx和SHLDy具有相同的波形,但二者180度异相;通过将FDC1004置于差分模式配置中,这是可能实现的。
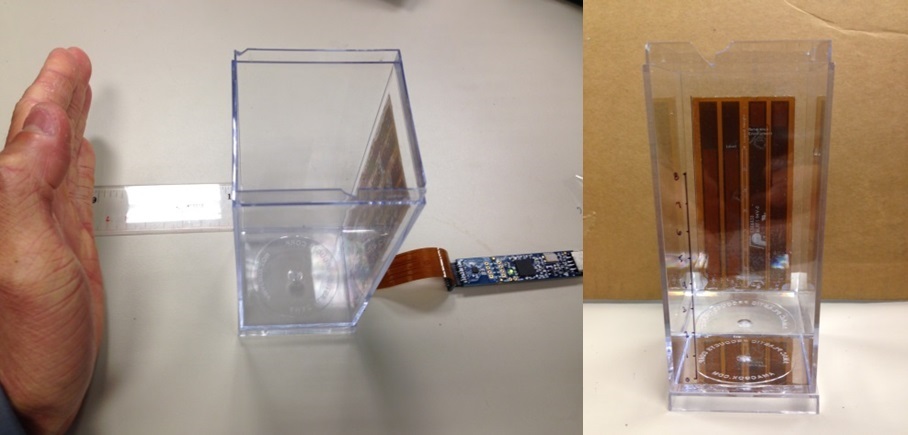
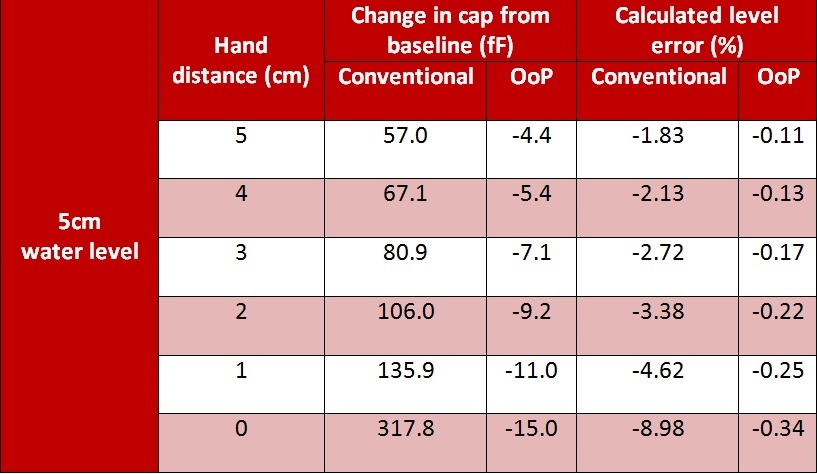
笔者收集了用电容式液位感测TI设计参考设计测得的手干扰电容测量值,并将该参考设计与使用相同尺寸电极的传统方法进行了比较。图3展示了测试设置,参考设计在容器上,并连接至FDC1004评估模块(EVM)。表1展示了水位高度为5cm、人手离容器前部的距离固定时的电容测量值。当手直接接触容器(手的距离为0cm)的时候,如果采用传统方法,基于基线读数(手未在系统中出现时的读数)的电容变化会是采用OoP技术时的20倍。如果采用OoP技术,计算的液位绝对误差会从大约9%(采用传统方法时)降至大约0.4%。在系统的全范围(0至8cm的液位高度)内,OoP技术的总体绝对误差大约为0.5%。
任何电容式液位感测系统的稳健性均至关重要,以确保可靠性和准确性。与传统方法相比,OoP技术可减轻任何外部寄生电容的影响。尽可能对称的传感器布局将最大限度地提升该技术的性能。
其它资源
l 查阅《电容式感测:异相液位技术》应用手册。
l 开始使用TI的“电容式液位感测”TI设计参考设计。
l 立即用FDC1004 EVM启动您的设计。
l 阅读更多有关电容式感测设计的博客文章。
l 在德州仪器在线技术支持论坛社区电容式感测论坛搜索答案并获得帮助完成您的设计。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
