Anjin Du / Shawn Han---China Telecom Application Team
摘要
本文首先主要介绍了TI 的新一代时钟产品LMK0480X 的holdover 功能和指标,以及在新一代的无线C-RAN 网络中的应用。通过对LMK0480X holdover 的指标分析,证明LMK04808 完全满足通信网络的时钟倒换的需求。
1、Holdover 功能的引入
在目前的通信系统当中,无论是有线还是无线,都是一个时钟同步系统。参考时钟从宿源端通过网络传递给系统中的各个设备;为了提高系统中各个设备的稳定性,同时为了提高系统中设备对于不同应用的灵活性,一般都有超过一路的参考时钟输入到设备中。当设备中的时钟单元在这些输入的参考时钟中切换时,要使时钟单元的输出要保持性能和时钟的稳定性,这就要求时钟电路具备holdover 功能,支持参考时钟hitless 切换。
以往的模拟时钟电路中所谓的holdover 功能,只是当发生时钟切换时,鉴相器的电荷泵被强制输出到VCC/2;但某些情况下,时钟锁定时的电荷泵电压和VCC/2 差别比较大,这样在时钟切换的过程中,输出时钟的跳变可能会超出系统所能允许的范围,造成系统的时序紊乱。
在TI 最新的时钟去抖芯片LMK048XX 系列中,增加了电荷泵电压跟踪电路;这个电路实时采样电荷本电压并且保存更新到芯片的集成DAC 上;当芯片在输入时钟切换的过程中,电荷泵电压输出切换到DAC 的输出上,这样在参考时钟切换前后,压控电压变化非常微小,保证了系统时钟的稳定性。
LMK0480XX 系列时钟器件的Holdover 功能是真正的hitless switch,下面的章节将详细介绍holdover 的整个过程及相关的指标。
2、LMK0480x 系列产品holdover 功能介绍
LMK048xx 系列是TI 推出的新一代时钟去抖芯片,采用了两级锁相环级联的架构。第一级锁相环,利用窄带环路滤波器和外部VCXO,主要完成对输入参考时钟去抖;第二级环路滤波器主要利用高性能的内部锁相环生成系统需要的各种时钟。上文提到的Holdover 功能是第一级锁相环具备的功能。
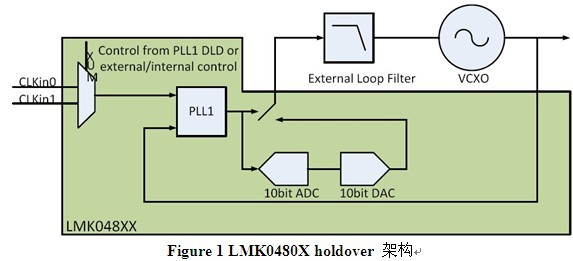
上图是LMK048XX holdover 的功能框图。其中,CLKin0 和CLKin1 分别是来自网络的两个参考时钟,选择一路作为时钟芯片以及系统的主时钟。当网络设备发生主从倒换或者业务切换时,时钟芯片的参考时钟也随之切换。触发参考时钟切换的条件可以为a. PLL1 的DLD 状态,b.外部管脚的硬件控制,c. 内部寄存器控制。下面的讨论我们假定切换是以PLL1 的DLD 状态触发的。
当LMK048XX holdover 功能使能时,一个完整的参考切换过程如下图所示,主要分为如下几个步骤:
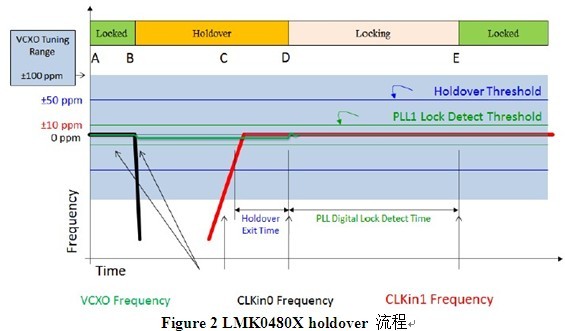
Step1: PLL1 正常锁定在CLKin0, PLL1 DLD 为高;LMK048XX 集成的counter ADC 跟踪VCXO 的压控电压并更新集成的counter DAC, 更新的速率为PDF/DAC_CLK_DIV,每个更新周期内上升或下降一个LSB。
Step2:当CLKin0 由于某些原因丢失或出现比较大的频率误差时,PLL1 的鉴相误差超过锁定窗口(PLL1_WND_SIZE),DLD 为低;DLD 为低时,ADC 停止跟踪压控电压及更新DAC,DAC 的输出保持在最后锁定时的压控电压;DLD 拉低同时触发LMK048XX 进入holdover 状态,内部开关切换VCXO 的压控电压到DAC 输出。
在这个过程中,由于ADC/DAC 的DNL 误差(+/-2LSB),导致输出频率与锁定频率之间产生了频率误差,可以根据以下公式得到频率误差或频率准确度:

一般情况下,holdover 的频率误差可以控制在0.5ppm。进入holdover 功能以后,VCXO 的频率稳定度主要取决于VCXO 以及LMK048XX 自身的温度特性。
Step3: 当芯片检测到CLKin1 的有效参考输入后,LMK048XX 不会立即退出holdover;VCXO 的输出首先会与CLKin1 的参考输入进行鉴相,只有连续HOLDOVER_DLD_CNT 个鉴相周期频率误差小于PLL1_WND_SIZE,LMK0480XX 将会退出holdover。按照最差情况下,如果要满足退出条件,CLKin1 和VCO 的频率误差应该满足:
退出holdover 所用的时间与CLKin1 和VCXO 的初始相位有关,考虑最差的情况,退出holdover 所用的时间为:
Step 4: 当LMK048XX 退出holdover 以后,VCXO 的Vtune 电压切回到PLL1 charge pump 输出,同时CLKin1 和VCXO 开始锁相。由于在退出holdover 的过程中,VCXO 和CLKin1 的相位已经相当接近(PLL1_WND_SIZE),所以在重新锁定的过程中,VCXO 和CLKin1 的相位误差迅速减小,满足小于PLL1_WND_SIZE。一般情况下,这个时间不会大于20ms。
在LMK048XX 中,为了使芯片稳定锁定,VCXO 和CLKin1 的误差必须连续PLL1_DLD_CNT 个鉴相周期小于PLL1_WND_SIZE,DLD 才会置高上报芯片重新锁定。重新锁定的时间:
Step 5:当芯片再次锁定,DLD 重新置高,触发集成的ADC 重新跟踪VCXO 的压控电压,并开始更新DAC 输出。
由于DAC 是coutner 型DAC,更新的速率为每个工作周期增加或降低一个1LSB。当考虑最差情况下,DAC 更新到VCC/2 的时间为:
LMK048XX 要求PFD/DAC_CLK_DIV < 100KHz,以保证DAC 的更新速度。
至此,LMK048XX 已经完成了输入参考时钟的整个平滑切换,进入了重新锁定的状态。
3、Holdover 功能的参数设置
3.1 Holdover 功能的配置
使用holdover 功能,必须首先Holdover_Mode = Enable;在绝大多数的应用场景,内部的DAC 输出需要跟踪 VCXO Vtune 电压,所以EN_Track = 1; 并且跟踪电路的正常工作需要在PLL1 锁定之前设置EN_Track =1;否则,当PLL1 锁定之后,设置EN_Track=1 并不能使DAC 输出跟踪Vtune 电压。
DAC 的电压也可以是手动设置,此时需要EN_MAN_DAC = 1;同时LMK0480X 提供了两个寄存器,DAC_Low_Trip 和DAC_High_Trip, 用于设置DAC 输出电压的上下门限。
触发芯片进入holdover 状态,可以是以下任一条件:
Force_holdover = 1;
PLL1 失锁 或DLD =0;
Vtune 或DAC 跟踪电压超出DAC_Low_Trip 和DAC_High_Trip;
在使用的过程中,需要根据不同的系统需求选择合适的holdover 触发条件;从目前来看,大部分应用场景选择PLL1 失锁或DLD = 0 触发holdvoer 状态。
最后还需要配置Holdover_DLD_CNT 以及DAC_CLK_DIV,这两个寄存器的功能在第二章中已经介绍。
3.2 Holdover 参数配置的注意事项
当系统上电开始工作是, CLKin0 或CLKin1 来自光纤的恢复时钟, 性能并不稳定。若Holdover_DLD_CNT 和PLL1_DLD_CNT 值设置比较小,LMK0480X 很容易进入锁定状态,本地时钟VCXO锁定CLKin 输入信号,同时DAC 开始跟踪VCXO 的Vtune 电压;但前面提到,通常CLKin 在刚开始工作时并不稳定,某些情况下CLKin 的输入可能漂出VCXO 的频率调整范围,导致器件重新失锁并进入holdover 状态,并且此时holdover 输出电压可能为3.3V 或0V;在这之后,CLKin 的频率渐趋稳定,但CLKin 的频率和VCXO(Vtune = 0V 或 3.3V)的频率不能满足退出holdover 的条件,出现了LMK0480X 无法退出holdover 的情况。如下图PartA 部分所示。因此,在holdover 功能电路设计中,通常适当的增加PLL1_DLD_CNT 和HOLDOVER_DLD_CNT 的值,使得退出和锁定的判决条件更为苛刻,只有当CLKin 稳定时,才会退出holdover,进入锁定。如下图PartB 部分所示。
另一方面,在第二章中分析得到,当PLL1_DLD_CNT 和HOLDOVER_DLD_CNT 的值过大时,会影响时钟切换的整个时长,所以在应用中,PLL1_DLD_CNT 和HOLDOVER_DLD_CNT 值得选取,是一个折中的过程;同时也可以通过芯片的配置流程对这个问题加以改善。
4、Holdover 功能在无线RRU 中应用的需求分析
4.1 C-RAN 网络架构的优势
随着电信业务的蓬勃发展与用户行为的不断变化,无线接入网正面临着前所未有的挑战:大量站点导致高能耗,网络的资本支出与运维成本逐年增高;站点资源难以获取;复杂的网络环境致使无线覆盖质量不高,潮汐效应导致部分基站利用率低下……面对技术、成本、资源和安全等多个问题 ,2010 年4 月,中国移动提出新一代绿色无线接入网架构C-RAN。
C-RAN 架构是在分布式基站基础上的进一步创新,通过基带集中处理(Centralized)、协作式无线电技术(Collaborative)以及实时云架构(Cloud),实现网络资源共享以及动态的网络负载均衡,实现无线接入网的绿色高效(Clean)并面向未来平滑演进,提供更大的带宽和更灵活的多标准运营支持,如图4 所示。
4.2 C-RAN 网络中环形倒换对时钟指标的要求
在C-RAN 组网中,如图5,基带集中RRU 拉远需要光纤互联,采用多级级联和环形组网,一方面各站点RRU 通过光纤接入环采用环形组网方式接入BBU,有效节省光纤资源,另一方面这种组网结构支持环网倒换保护功能,充分保证网络安全和可靠性,即当任何一段光纤意外损坏或者链路中任一个RRU损坏, 会自动倒换到反向链路, 从而不会影响上级或下级RRU 的正常工作。
RRU 级联系统在正常工作中,每个RRU 的系统参考时钟来自上一级RRU;当RRU 在完成环网倒换过程中, RRU 的系统参考时钟的来源也会切换,从切换前的来自上一级RRU 切换到另一侧的RRU;在整个切换的过程中,系统时钟必须保持一定的稳定度和准确度,从而保证现有用户不掉话,保证通话MOS和数据业务吞吐率。
以TD-LTE 系统为例,基站具体的时钟需求如下:
不同基站间空口同步信号相对时间误差小于+/-1.5us;
基站空口载波频率稳定度优于+/-0.05ppm;
基站输入抖动容限不小于±200ns;
BBU+多级RRU 串连级联时空口相对传输输出接口的时间精度小于±300ns;
在时钟切换的过程中,需要确保数字部分的FIFO 不要溢出,同时也要考虑频率误差带来的空口同步误差,小于系统的要求+/-300ns。
假定在切换过程中,频率误差为X*10e6 ppm, 每帧长度为Tf,则造成300ns 的空口误差需要的时间Ts 为:
假定X =
, Tf = 0.01 S, 则Ts = 0.3 S, 即整个切换过程必须在0.3 S 内完成,否则频率误差可能造成空口的同步误差,造成TD 系统的收发切换紊乱。同理,假设FIFO 的工作时钟是Fclk,当FIFO 深度为1 时,造成一个码片误差的时间Te 为:
当FIFO = 491.52MHz 时,Te = 2mS. 可以看到这个要求是相当苛刻的;但这个问题可以通过增加FIFO 的深度来解决。当FIFO 深度为1000 时,Te = 2 S;但继续增加FIFO 深度已经没有意义,因为瓶颈已经变成了Ts。
通过同时可以看到,当提高切换过程中的频率稳定度,降低频率误差,可以延长切换过程需要的时间;反之,如果切换过程中频率度很差,则必须快速完成切换,否则很容易造成客户断链掉话。
根据第二章中介绍的LMK048XX 系列的介绍的holdover 功能,假定PLL1_WND_SIZE = 40nS, FPD1 =1.024MHz, Holdover_DLD_CNT = 4096,PLL1_DLD_CNT = 4096,DAC_CLK_DIV = 32,在整个切换过程中,总共用时为0.053(Texit _ holdover ) + 0.024(Tlock ) +0.016(Ttrack ) = 0.093s, 在切换过程中输出时钟的精度保持在0.5ppm。根据前面讨论的C-RAN 系统需求(切换时间<0.3s,频率精度<1ppm),LMK048XX 完全可以满足环形网络系统在倒换情况下的时钟精度需求。
5、总结
本文主要介绍了LMK048XX 系列时钟的holdover 功能。通过对C-RAN 系统时钟切换需求的举例分析,证明LMK0480XX 的holdover 功能真正的实现了hitless switch,完全可以满足通信系统的时钟切换功能,大大简化了通信系统的时钟单元的设计难度和成本。
6、参考资料
1. LMK04800 Datasheet
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。

