作者:Zhao Tang
从我发表这个简单无刷DC (BLDC) 电机旋转基础知识入门博客系列的第一部分到现在,已经有一段时间了。在第一篇博文中,我谈到了设计一个BLDC电机控制系统时的5个关键优先级:效率、噪声、灵活性、相关性和成本。现在是时候从一个稍微不同的角度来看一看常见的3相BLDC电机控制方法。我们先从传感与无传感器电机控制之间的比较开始。
与有刷DC电机不同(在有刷DC电机中,控制方法可以简单到用电池直接驱动),而在没有电刷的情况下,一个BLDC电机必须找到一个实现电机换向的替代方法。工程师曾经首先想到的是利用传感器。有不同的方法对这些传感器进行分类,而我将这些传感器分为两类:
-
解算器和/或光电编码器(图1)。这些感测组件以极高的分辨率测量电机转子角度,从而实现高精度位置/速度控制和高效率。另一方面,这两类传感器均价格昂贵(特别是解算器更是如此),并且在系统中需要额外的数据转换/处理,这就进一步增加了系统成本。因此,这些传感器在需要高性能/高精度电机控制的特定工业和汽车应用中更为常见。
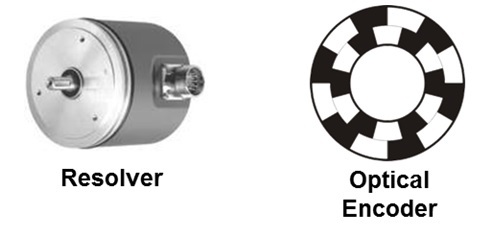
图1:解算器/光电编码器
-
霍尔效应感测元件/集成电路 (IC)(图2)。这些基于霍尔效应的磁场感测器件能够发出表明磁场极性变化的信号,用户可以利用这一信号进行电机换向。从本质上讲,一个基于霍尔效应传感器的BLDC控制系统不能提供最高分辨率,但是与解算器和光电编码器相比时,相对较低的成本使它成为一个更加划算,并且“足够好的选择”。当极高精度不是最关键的应用需要时,这往往是最常见的传感器的选择。
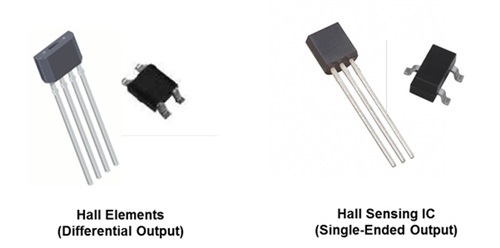
图2:霍尔效应感测元件、集成电路(IC)
霍尔效应传感器在使电机旋转方面工作得很不错,特别是在负载条件急剧变化时更是如此,从而实现了电机的可靠运行。然而,由于以下3个主要原因,电机控制工程师对它们并不是很满意:
-
电机制造流程所涉及的工作量,其中包括霍尔效应传感器放置、密封和连接、以及将霍尔信号从电机内引出时的接线。
-
应用中的传感器和电线会磨损。
-
即使成本低于解算器/光电编码器,霍尔效应传感器仍然增加了系统的成本,这并不仅仅是针对传感器本身而言,还有整个霍尔传感器电路板带来的成本增加。它还有可能增加电机的机械设计的变更成本。
因此,就产生了对于“无传感器”解决方案的需要,在这种解决方案中,电机控制工程师可以通过在他们的电机中去掉霍尔效应传感器来解决所有的问题。典型的无传感器电机控制方法包括:
-
通过一个旋转电机的反电动势 (BEMF) 来进行位置估算(图3)。作为一台电机,BEMF与磁场和电机速度的乘积成正比,而电机位置是磁场的函数。所以,借助BEMF,你能够在不需要霍尔效应传感器的情况下,知道和控制BLDC电机的位置和速度。其中的挑战包括如何获得BEMF信息,以及在电机速度为零(也就是说没有BEMF信息)的情况下应该怎么办。我将在下一篇博文中简单的讨论这些内容。
-
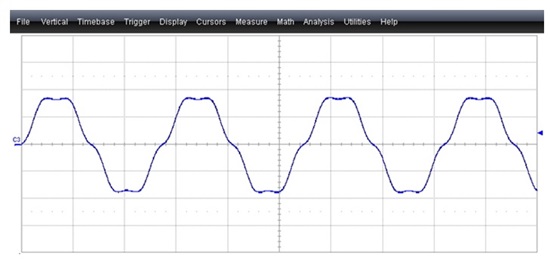
图3:一个“梯形”BLDC电机的BEMF电压示例
-
场定向控制 (FOC)。FOC并不一定意味着无传感器,这是因为你可以在用于伺服机应用的FOC系统中不时地发现解算器/编码器的身影。不过,只要电机开始旋转,FOC就不再需要传感器来完成后面的工作了。我不想在一篇博文中的某一段落中对FOC进行完全解释和说明——这个话题太大,其中涉及矢量控制和Clarke/Park变换等内容。不过,我想谈一谈为什么人们想花时间来研究FOC。与其它无传感器的方法相比,FOC在低速时提供平滑运动,而在高速时可实现高效运行,它所实现的高灵活性和可靠运行是BEMF方法难以企及的。所以,执行FOC系统需要非常强大的微控制器也就是一件自然而然的事情了,而这也会使系统的成本更高。
你是不是觉得我遗漏了与传感/无传感器BLDC电机控制相关的某些内容?请在下方给我留言,谈谈你的想法。在我的下一篇博文中,我将从一个不同的角度讨论BLDC电机控制方法,并且来谈一谈梯形和正弦控制算法。
其它资源:
-
下载一份白皮书,进一步了解无传感器控制。
-
阅读更多与霍尔传感器应用相关的内容。
-
进一步了解一款针对电动工具应用的无刷电机参考设计。
-
观看视频,查看一个3相无刷DC电机的正确换向顺序。
原文链接:
http://e2e.ti.com/blogs_/b/motordrivecontrol/archive/2015/10/15/simple-bldc-motor-spinning-101-part-2-sensored-v-sensorless-motor-control
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。


